MACROSS Project Page (MSCA 752979)
Background |
Since the invention, automobile has rapidly become one of the indispensable tools for human beings. Vehicles have significantly improved human’s life quality, but also brought traffic accident and jam problems. Integrating information and communication technologies (ICT) into the transportation infrastructure to establish intelligent transportation system (ITS) has been deemed as an inevitable trend in the evolution of modern transportation and traffic management. Several companies and research labs have successfully demonstrated prototypes of automated cars. However, a great number of theoretical and technical challenges still need to be addressed in order to reap the full potential of ITS.
The decision making process of most current driver assistance applications and autonomous driving functions completely rely on the processing of on-board sensor data. Due to the physically constrained sensing range and accuracy, as well as limited computation and storage capacity, a vehicle's capability of understanding the complex driving environment is unsatisfactory. An effective solution to this issue is to allow the sensing/computing/storage resources of different elements in the ITS to be shared, so that the environment perception and decision-making ability of each individual can be greatly enhanced. This idea stems from the cloud computing technology and constitutes a recently emerged concept, vehicular cloud network (VCN). Supported by mobile edge computing (MEC) framework, VCN enables ITS services and applications that individual vehicles cannot produce alone. In the MARCROSS project, funded by the European Union’s Horizon 2020 Research and Innovation Programme under the Marie Sklodowska-Curie Grant 752979, we investigate novel methods to facilitate efficient transmission and processing of multimedia sensing data over VCN, to potentially support future autonomous driving functions. |
Architecture |
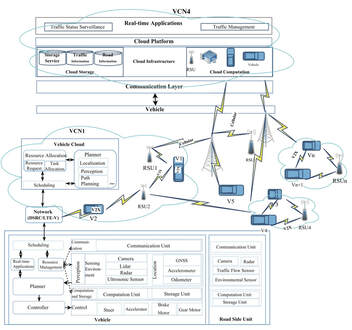
A VCN can be considered as a group of vehicles and infrastructure whose sensing, communication, computing, storage, and possibly other physical resources can be coordinately shared. We can consider two layers of VCN. The smaller local VCNs are formed by vehicles and/or RSUs in the vicinity. Typical use cases include cooperative sensing/ maneuvering applications, and MEC/edge intelligence services. Connecting a number of local VCNs, scattered vehicles and infrastructure (e.g., through the macro BS) would form a higher-layer of global VCN. A global VCN can be seen as a pool of vehicle and infrastructure resources on a much larger scale, and can support traffic monitoring, management, and sophisticated data analysis. |
Case Study |
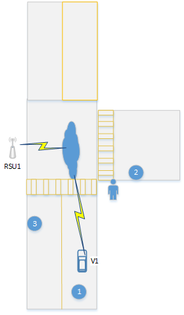
We implemented a typical driving assistance application supported by the concept of VCN. An ego vehicle drove towards a T-junction. The driver's view on the T-junction was completely blocked by woodland beside the road. An RSU was established near the T-junction. Its camera can capture and detect movements of pedestrians, bicycles, and vehicles. The vehicle intended to turn right upon arriving in the T-junction, while a pedestrian intended to walk across the road. To have a better understanding of the environment of the T-junction, the vehicle demanded the support of the RSU: a VCN was formed to extend the vehicle's sensing range. Our experiment vehicle was a BAIC Senova 25 car, equipped with a Cohda MK5-OBU for supporting V2X communication. A Huawei CMIIT tablet was used as HMI. In addition to a Cohda MK5-OBU, the RSU was equipped with a Hikvision DS-2CD3T56WD-I3-4MM infrared camera and a SMS microwave radar detector for object detection. The detection result were sent to the vehicle.
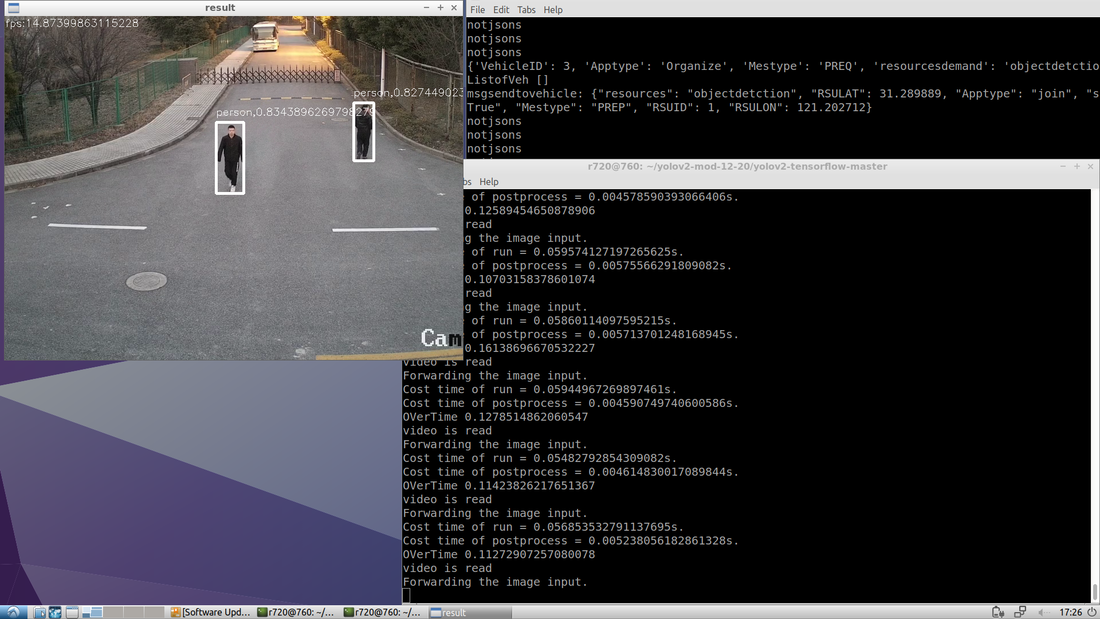
The results shown below displays the experiment conducted in a dark evening. It was hard for the driver to directly see the pedestrian. The movement of the pedestrian was well detected by the RSU (left) and sent to the vehicle to display on the HMI as a dynamic map (right). The driver can visualize the existence and walking directions of the pedestrians long before the vehicle approached the T-junction. Therefore, the driver could take early actions to avoid possible collision even though he did not see the pedestrian.
|

Efficient Application-driven Transmission design |
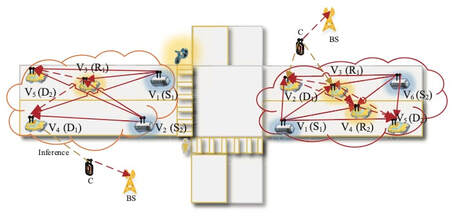
Under the framework of VCN, transmission of content-rich multimedia sensing data will be more promising to realize functions that each individual cannot. Two example application scenarios of sensing data sharing are shown below. The left side illustrates a VCN with four vehicles conducting cooperative objective detection in complicated driving conditions such as road intersections. V1 and V2 have advantageous locations to obtain accurate sensing results regarding their surrounding environment, e.g., the existence, position and movement of obstacles near the intersection corner. Sharing their sensing data with those who are relatively far away from the traffic scene (i.e., V4 and V5) enables greatly improved sensing range. The right side shows another network. Now V1 and V6 act as sensing information sources and desire to distribute their data to V2 and V5.
|
|
|
Due to fast changing network topology and complicated signal propagation environment, the quality of message sharing is often hard to guarantee. In this case, cooperative communication can serve to significantly improve performance. For example, for the left side scenario V3 shares its own communication resources with others and serves as a relay to guarantee the sensing data to be delivered from V1 and V2 to V4 and V5 with low probability of failure. For the right side scenario, the message sharing can be helped by V3 and V4. Introducing cooperation to improve communication performance in wireless networks has attracted much recent interest. From an information-theoretic viewpoint, multi-hop networks are fundamentally different from single-hop networks, since relays bring complicated interference and signal processing issues. The capacity of even very small relay networks is still unknown. Efficient transmission designs in many types of networks are far from being well-understood.
In the past years, the advantages of relaying have been exploited mainly from two aspects. First, recent achievements in network information theory have shown that relays can provide degrees of freedom (DoF) gain to multi-user wireless networks. This implies that, the capacity region of multi-hop networks may be much larger than that of single-hop networks, at least for the high SNR regime. Another research trend takes more practical conditions, including imperfect channel knowledge and limited node coordination, into consideration and exploits relays' capability of providing diversity gain for improving transmission reliability. Extensive investigations have been conducted to design efficient relaying schemes for link-level information delivery between a single source-destination pair. Those schemes can be readily employed in multiple-user networks when different users' transmissions are orthogonalized. However, each relay is normally forced to separately forward different sources' messages, using, for example, repetition coding or distributed space-time coding. Network resources are inefficiently utilized. Applying the network coding technique at relays is capable of realizing network-level transmission in wireless cooperation networks. However, directly employing the conventional binary network codes to combine source messages in general multi-relay networks may not be able to attain full diversity. Coding operation in the high-order finite field has been proven to be maximal-diversity-achievable in large cooperation networks with multiple sources and multiple relays. To avoid complicated inter-user interference, many existing works demand spectrally-inefficient orthogonal transmissions. Message transmissions are also commonly assumed to be conducted over Rayleigh fading channels among single-antenna nodes, which may not be able to fully reflect the characteristics of vehicular communications channels. In the MACROSS project, we propose combining finite-field network coding with non-orthogonal transmission/multi-antenna cooperative transmission techniques to support reliable multimedia sensing data transmission among vehicles, over complex fading channels. We study the impact of complicated random interference on the performance of cooperative V2X communications to assist in transmission design. Searching for the fundamental performance limit of large cooperative communication networks from the information theoretic viewpoint is also conducted. Furthermore, in addition to the complex signal propagation environment, the another challenge of data transmission design in VCN comes from the fact that multiple types of applications must be supported at the same time. In general different applications pose diverse quality-of-service (QoS) requirements on delay, accuracy and throughput etc. Efficient and reliable transmissions are difficult, especially when multiple users coexist and the bandwidth/battery resources are limited. Wireless transmission design through power control, rate adaption, and channel assignment have been studied extensively in the past decades. Most conventional solutions are proposed from the viewpoint of information theory based on only the CSI in the PHY layer. Resources are allocated according to transmission opportunity, irrespective of the delay performance. Hence the resulting latency may be unlimited. Taking the queue state information (QSI) in the MAC layer also into consideration allows a balance between transmission delay and other desired transmission design targets. In the MACROSS project, we investigate efficient cross-layer transmission techniques that exploits both CSI and QSI to simultaneously enable multiple diverse delay-sensitive applications for multiple vehicles, to better support sensing data transmissions over VCNs. |
Effective Network-aware processing design |
The on-board computation, storage, and energy resources of vehicles are normally insufficient to support advanced smart vehicle applications such as autonomous driving. The concept of VCN provides new opportunities to significantly enhance the hardware and software capabilities of individual vehicles. Offloading computation-intensive tasks to the remote cloud center has attracted much research interest and is believed to be capable of supporting complicated ITS applications and services. Nevertheless, the long transmission distance between end terminals and cloud center may cause serious latency, jitter, and network congestion issues, especially when dealing with content-rich vehicular sensing data and mission-critical tasks. The more flexibly mobile edge computing (MEC) paradigm provides computation capability closer to end users, and thus brings significant reduction in offloading latency and network congestion.
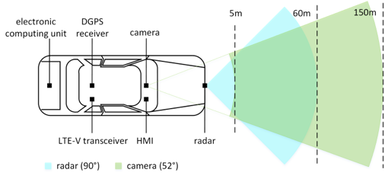
A key technical challenge in making offloading decisions (i.e., deciding whether to process the computation task using local resources or using resources of other VCN members by offloading the task data to others) is how to optimally balance the costs and gains. Processing resource-hungry tasks at other places (e.g., MEC servers) can in general enjoy richer computation resources, but may also result in larger latency and energy consumption during the data transmission and remote task execution processes. To simplify the problem, most existing solutions have been proposed based on the assumptions of a static environment (e.g., the characteristics of wireless channel remains unchanged) or a priori knowledge of the environment dynamics. However, with rapidly moving vehicles these are typically not the case. In the MACROSS project, we investigate the approaches to process complicated on-board application tasks through shared computation resources in uncertain dynamic environments, when the wireless conditions can only be partially available. The completely known vehicular networking environment (sometimes completely unknown) has also been frequently assumed in other use cases of VCNs. For instance, under the concept of cooperative adaptive cruise control (CACC), automated vehicles are grouped into platoons so that road safety, traffic efficiency, and energy efficiency can all be greatly improved due to the extremely smaller inter-vehicle distance. To maintain a reliable platoon, the key functions for the following vehicles are accurately detecting the position and status of their preceding vehicles, and then following them. Most existing perception and control solutions heavily rely on either individual vehicle's sensing data or the data attained from V2X receivers. These two types of data may both be unreliable, especially in complex traffic conditions with high platoon speed. We also implemented a CACC application on a real-world testbed of ours as a case study of the impact of V2X communications on autonomous driving function design. The testbed consisted of three SAIC Morris Garages cars shown below. The leading vehicle of the platoon can be operated by human drivers, and the two following vehicles are designed to autonomously adjust their speed so that a small constant distance from their respective front vehicles can be maintained. Each vehicle is equipped with a suite of advanced on-board sensing and communication devices, including a DGPS receiver, a front-facing millimeter-wave radar (Delphi ESR, mounted on the vehicle’s front bumper), a camera (Mobileye, mounted on the front windshield), an LTE-V transceiver (a prototype for V2V communication enabled by Huawei Balong765), and an HMI device (Huawei M2-A01L tablet). All these devices can interact through the vehicle’s gateway. The gateway provides sensing data to the CACC software platform. It also takes the acceleration and future trajectory commands from the platform to carry out vehicle control. In our system, a human driver can take over the vehicle from the automated driving mode, by pressing brake pedal or turning steering wheel. The HMI displays the platoon's status information and also allows human driver to send orders to join or leave a platoon. Our CACC software platform has a five-layer structure. An input layer provides data to the platform, including the kinetic state data measured by in-vehicle sensors, on-board radar and camera readings, DGPS data, data received from the LTE-V transceiver, and control messages input from HMI. A perception layer conducts object detection tasks. A world model layer processes the output of the perception layer and generates a world model for the platform the understand the environment. A low-level control layer is responsible for low-level control decision-making, to closely and safely follow its preceding vehicle. Finally, an output layer sends the control action signals to the gateway for maneuvering the vehicle, the V2V communication messages to the LTE-V transceiver for V2V broadcast, and display messages to the HMI for interacting with the driver. A number of field experiments were conducted, in the National Intelligent Connected Vehicles (Shanghai) Pilot Zone of China, Shanghai, to verify the feasibility of our testbed. Our results showed that using the on-board sensing data alone may not be able to accurately tract the preceding vehicle's trajectory (at least with the current hardware setup). Providing automated driving with collaboration capability through the V2X technology has the potential to significantly improve the environment perception quality. In addition, the perception layer of our platform provides the mechanism to deal with potential failure of V2V communication (due to, e.g., harsh driving environment). The function enables the low-level control layer to be operated smoothly even when V2V communication and vehicle cooperation are temporarily unavailable.
|

Publications |
|
